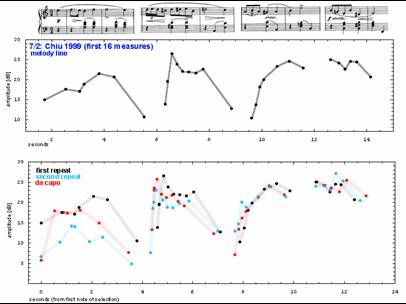
Dynamics
1
2
3
all at once: